# Use Cases
Hardware-in-the-Loop (HIL) Testing for Automotive Applications

Problem We Solve
Drive tests are tedious, expensive, are not always repeatable, and can be dangerous. Yet with more and more GPS-reliant services integrated into vehicles, testing is more critical than ever. Manufacturers of vehicles employing technology ranging from built-in navigation systems to full self-driving systems need efficient, repeatable, thorough ways to test vehicles that emulate all possible real-world conditions. Vehicle manufacturers and navigation system developers need to perform hardware in the loop testing in order to validate complex systems and how they interact together in real time.
Why it is Important
The implications on safety cannot be understated. Vehicles relying on GPSGlobal Positioning System is a navigation satellite system. See also data, particularly for autonomous driving functionality, must be prepared for interference, intentional and unintentional as well as environmental conditions that might make a signal unreliable. The easier it is to iterate and perform more tests, the higher the confidence manufacturers can have in a safe, reliable product whose failure could mean recalls, liability, and in the worst case, harm to passengers.
A GPS/GNSS simulator makes it possible to simulate the actual GPS signal required by the vehicle’s navigation instruments. It enables the simulation of real-world interferences like jamming and spoofing, interactions with other vehicles, and adaptation to unintentional disruptions like diminished or multi-path signals in cities with tall buildings.
How We Solve it
Hardware in the loop testing: Auto Drive Testing – with Record and Playback (RP) Option
- Record the GPS environment associated with a particular route.
- Upload the recorded data and modify as you wish to add “what-ifs” to your testing
Hardware in the loop testing: Real-Time Scenario Generator (RSG) Option
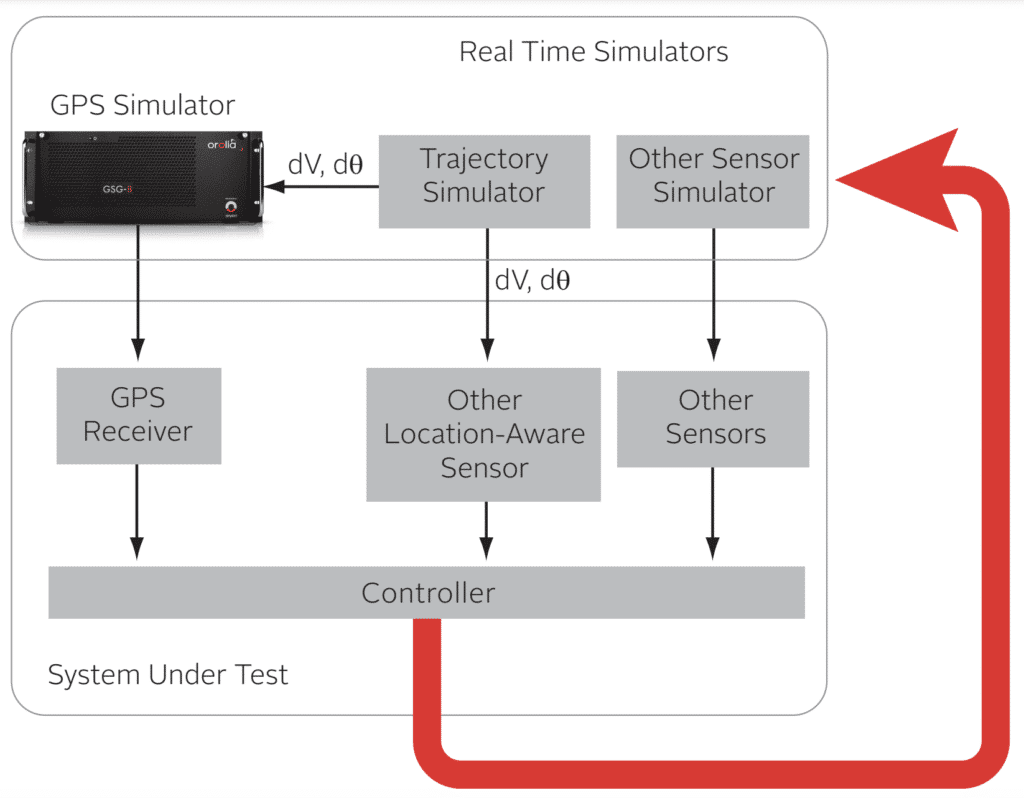
The RSG option supports the integration of actual GPS RF signals into HIL systems by integrating fixed latency streaming of 6 degrees-of-freedom trajectory via position, velocity, acceleration and heading commands. Vehicle orientation, changes, as well as satellite power levels, are also controllable via real-time commands. A common application is testing the integration of a GPS receiver and inertial sensors.
- Vehicle position data, either preprogrammed with a Hardware-in-the-loop Simulator or from a pre-recorded route is sent to a Skydel-based GSG Simulator.
- The Simulator (Skydel GSG-8) outputs the appropriate satellite data based on given position data.
- A-GPS option tests the ability of the device to receive and process assistance data from an LTE signal or RINEX files which is compatible with the simulated RF signal.
- RTK option offers the ability to send correction messages.

Why Choose Us?
- Drive test once, replay many, with modification via Record and Playback
- Hardware in the loop testing via Real-time Scenario Generation and Sensor Simulation
- Assisted-GPS test for improving acquisition
- Differential GPS test for increasing accuracy
- 1 to 64 satellite, or other, signals
- Configure-to-order and upgradeable
- Pre-configured test scenarios, easy to modify, create your own
- Windows software with Google maps interface
- Multi-GNSS, multi-frequency simulation
- GPS standard (L1 C/A), codeless (L2), new GPS (L2C, L5)
- Simultaneous GPS, GLONASS, Galileo, BeiDou
- Stand-alone operation
- Remote control and integration API via a variety of interfaces
- Our community of experts, best-in-class documentation, and outstanding support team will be there every step of the way to support you with any questions or issues you run into. We won’t allow you to fail!
Discuss Your Hardware In The Loop Testing Needs
